近日,南京农业大学智慧农业创新团队在国际著名期刊《Computers and Electronics in Agriculture》上发表题为“Multiple agricultural Machinery cooperative operations based on multi-algorithm models and multi-scenario analysis”的论文,为多农机的任务分配、路径规划及协同高效作业提供技术支持。
随着全球老龄化问题的加剧和土地的规模化经营,传统农业生产模式已经无法满足农业生产的发展需求,同时,物联网、大数据、人工智能等信息技术推动着现代农业生产朝着自动化、精确化、智慧化的方向发展。农业机械自动导航技术是现代精准农业的一个重要组成部分,在耕作、播种、收获等各农业生产环节中有着广阔的应用和发展前景。为了适应作业场景的多元化发展和规模化的作业需求,迫切需要从单机转向多机协同作业。
该研究针对农田多机协同作业存在的任务分配不合理、路径规划效率低下、过度依赖人工、优化目标单一等问题,以收割机与运粮车的收获场景为例,通过数据获取、场景感知分类、模型建立,并结合实际限制因素、田块遥感预测产量、多优化目标的基础上,提出一种普适性强的基于改进蚁群算法与CBS算法的多机协同任务分配与路径规划模型。试验结果表明,在多场景、多机种、多机型的作业背景下,多机协同中的任务分配算法模型能够准确的得到田块与多型号收割机、运粮车之间的分配调度方案,有效降低作业时间成本与路径时间成本。多机协同中的路径规划模型可以有效实现多作业农机的动态无冲突路径规划。
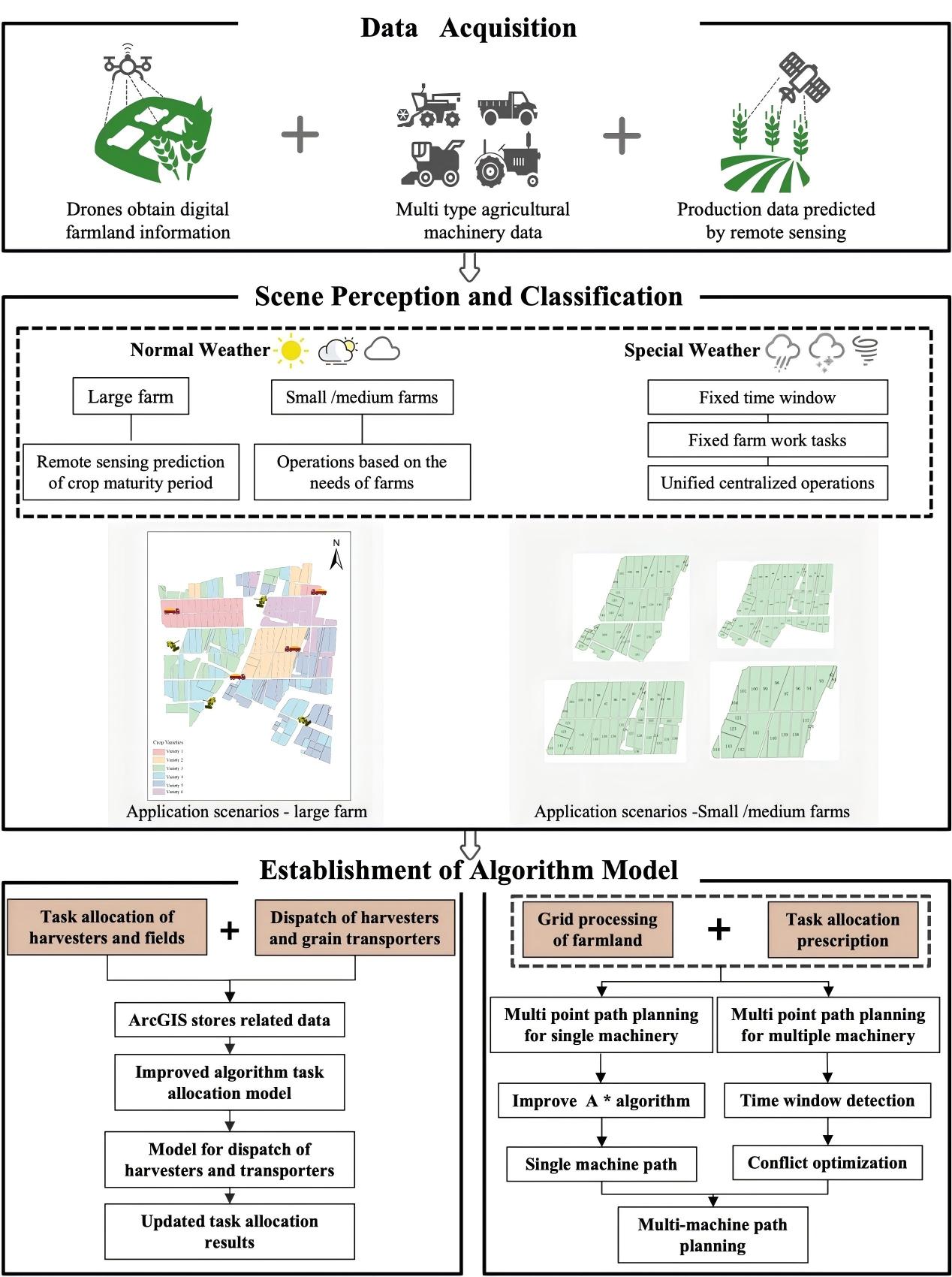
图 1 多机协同任务分配与路径规划整体仿真平台架构
该研究构建了“任务分配-协同调度-路径规划”三位一体的技术框架。在任务分配环节,团队创新提出改进的多算法融合模型,有效避免任务分配的局部最优解,实现了农机作业与田间分布的精准匹配。研究首次将遥感产量预测与农机协同深度融合,实现收割机与运粮车的高效协同。在路径规划环节,团队通过改进冲突搜索(CBS)算法结合时间窗口检测,实现了多机协同的动态无冲突导航规划。
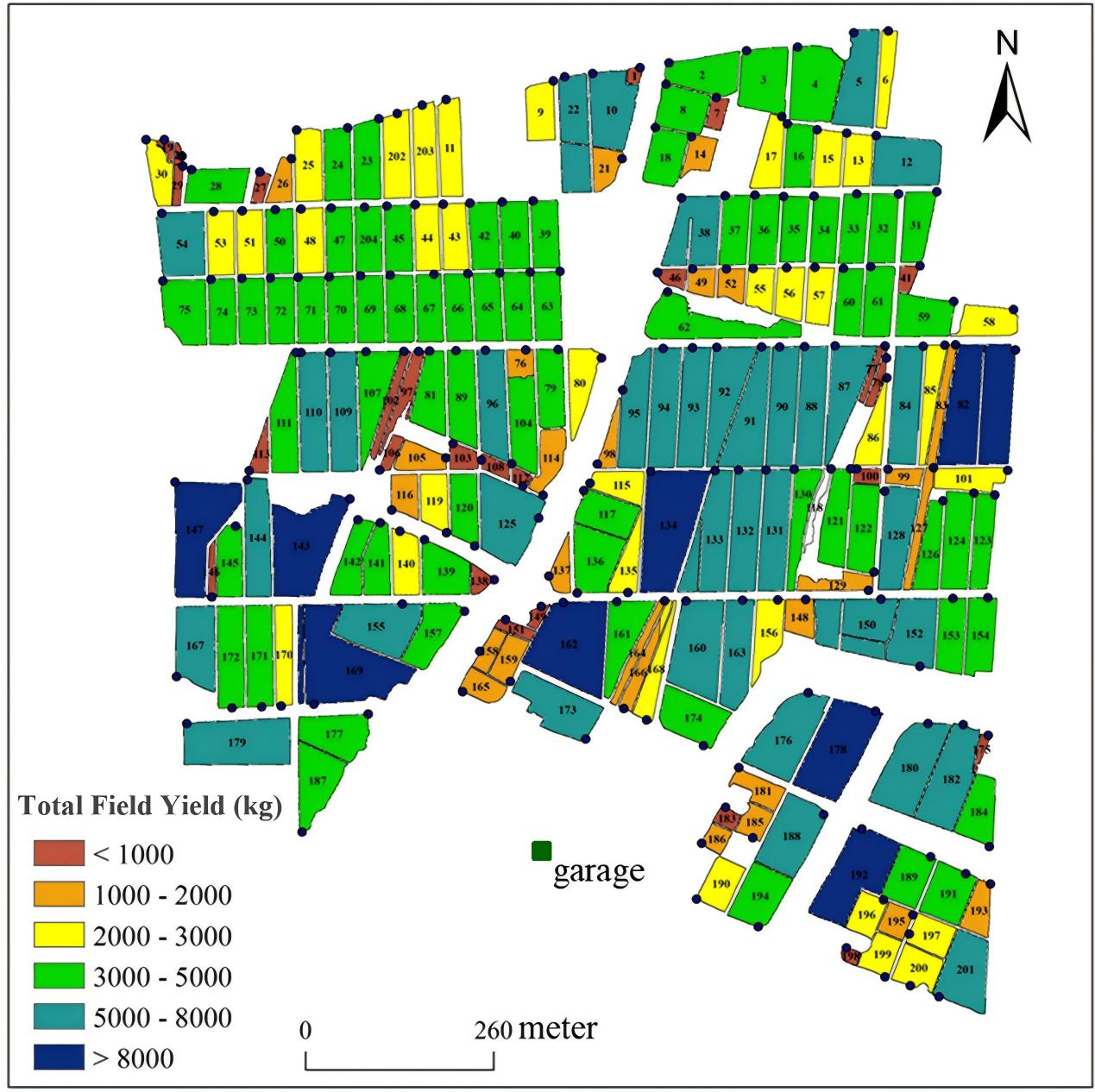
图2 试验田块位置信息与产量预测图
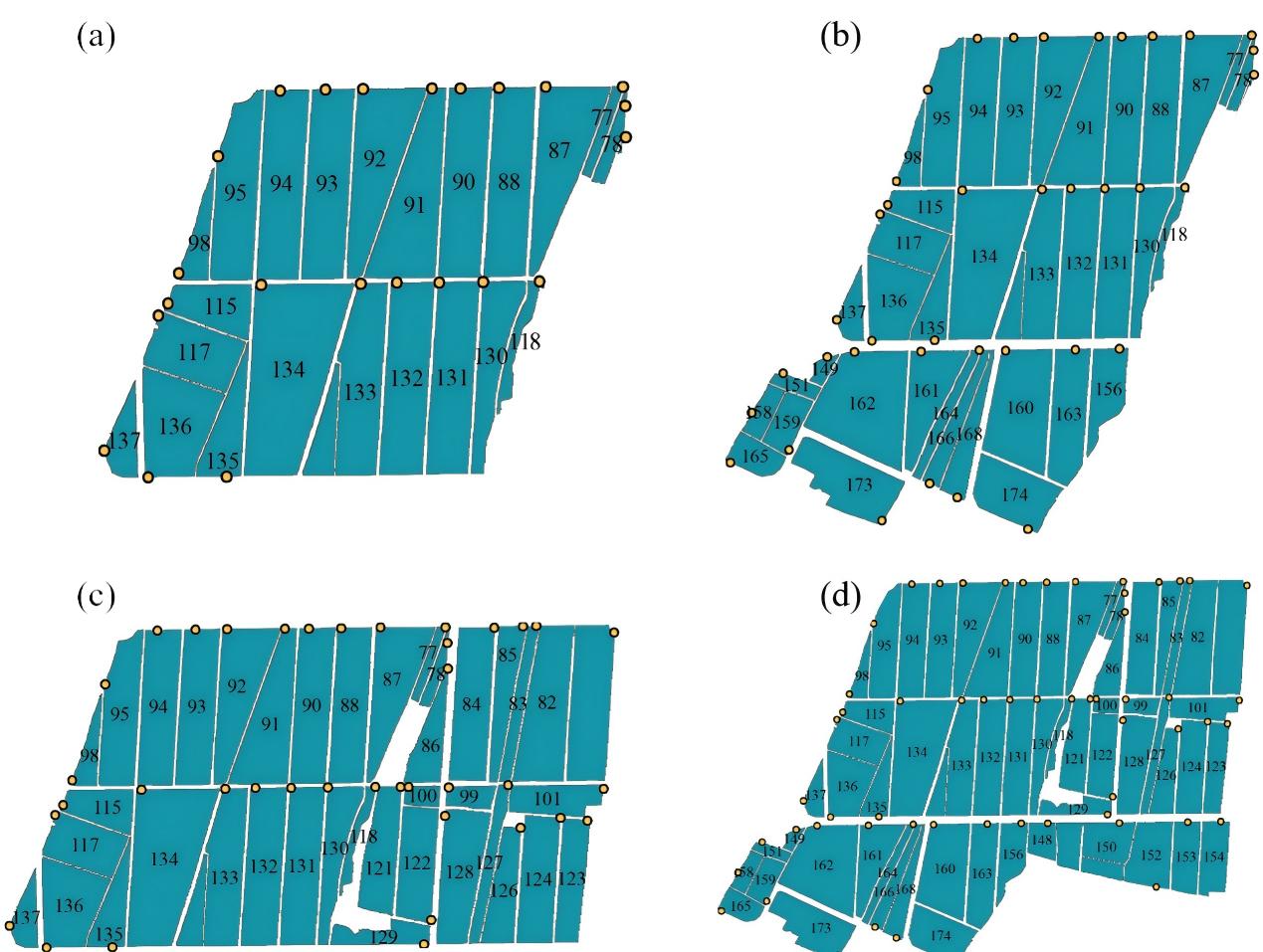
图3 试验田块地图:(a)22田块组合场景图;(b)37田块组合场景图;(c)38田块组合场景图;(d)58田块组合场景图
在江苏兴化粮食产业园的多场景组合测试中,该模型展现出显著优势:相较于传统方法,多台收割机的总作业时间平均降低49.76%,单一场景下最长任务完成时间从6.08小时缩短至2.59小时;运粮车路径成本平均降低5.97%,空驶与超载现象大幅减少;同时,通过时间窗口调整与路径优化,作业连续性显著提升。试验验证了模型在不同任务规模、田块复杂度下的稳定性,为不同农业场景的适配提供了有力支撑。
该研究首次将多算法模型与遥感数据深度结合,实现了农业机械协同作业从“经验驱动”到“数据驱动”的转变,为无人农场建设提供了可落地的技术框架,同时也为多机协同作业的规模化发展提供了重要技术范式。
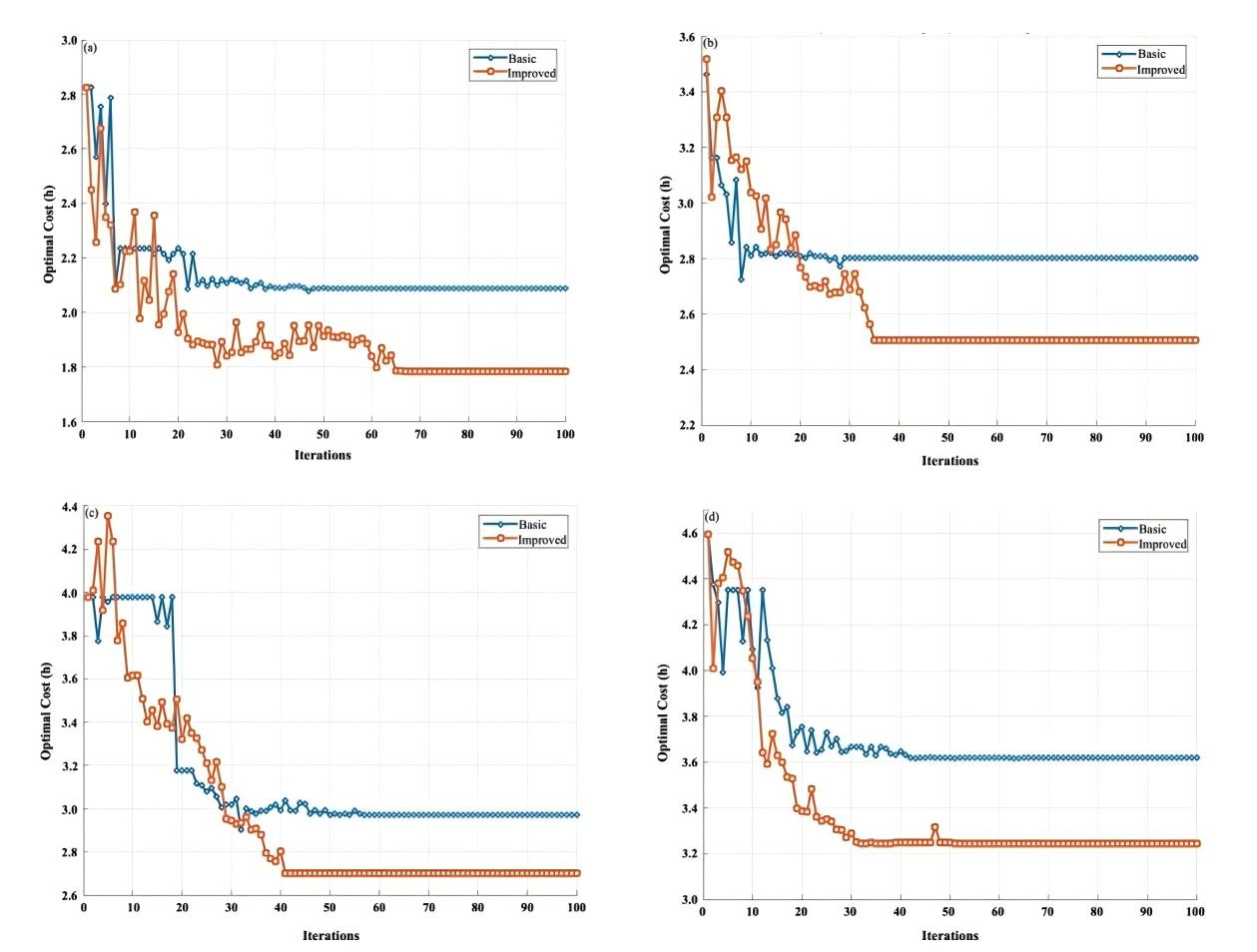
图4 基于蚁群算法与改进蚁群算法的单次仿真下任务分配结果对比分析:(a)22个田块组合下的仿真结果对比;(b) 37个田块组合下的仿真结果对比;(c) 38个田块组合下的仿真结果对比;(d) 58个田块组合下的仿真结果对比
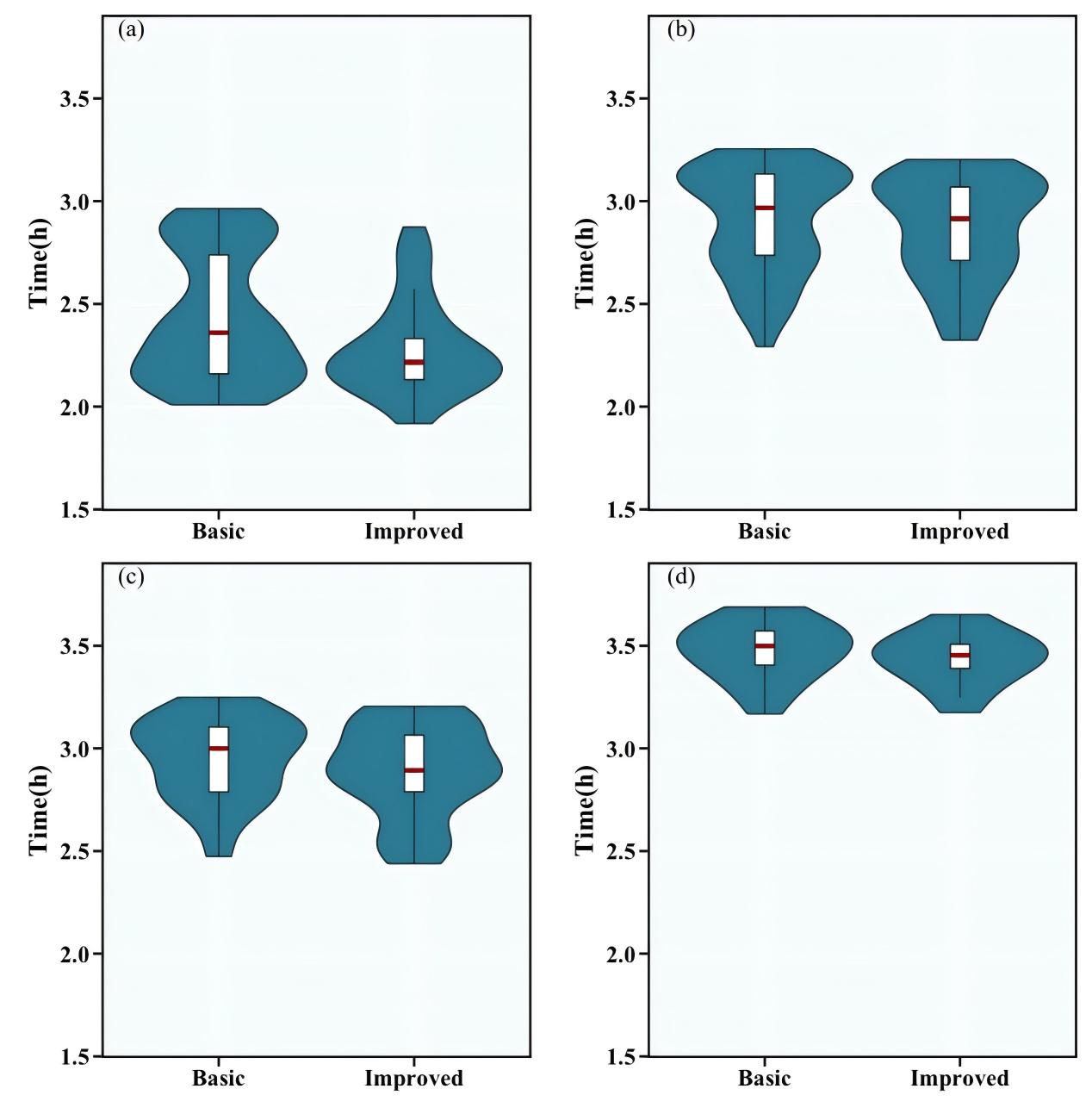
图5 蚁群算法与改进蚁群算法仿真结果对比:(a)22个田块组合下的仿真结果对比;(b) 37个田块组合下的仿真结果对比;(c) 38个田块组合下的仿真结果对比;(d) 58个田块组合下的仿真结果对比
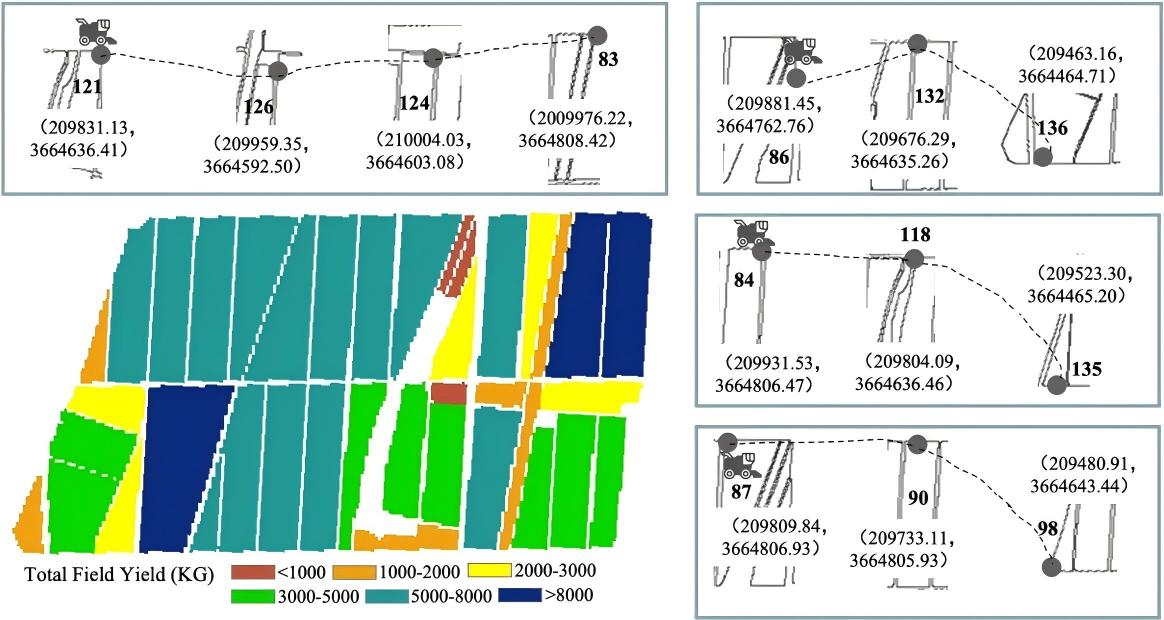
图6 遥感预测产量下的收割机卸粮需求田块信息
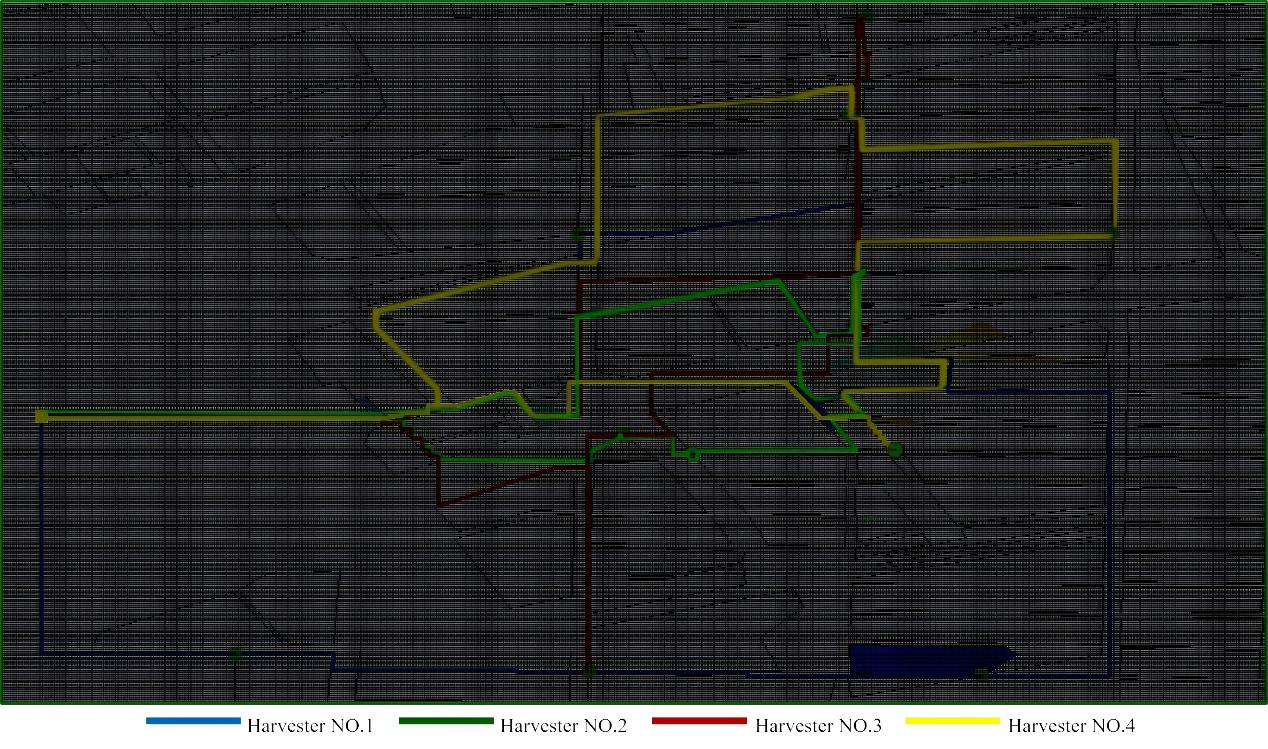
图7 基于CBS算法的多作业农机路径规划的四台农机协同作业路径规划
南京农业大学农学院国家信息农业工程技术中心为论文第一完成单位,博士研究生张子晗为第一作者,汤亮教授为通讯作者。朱艳教授、曹卫星教授等共同参与此项研究工作。研究受到了国家重点研发计划等项目的资助。